
TL;DR
A hobbyist built a custom robot actuator inspired by MIT research, achieving partial success in torque and speed. Testing revealed limitations, but plans for improvements are underway.
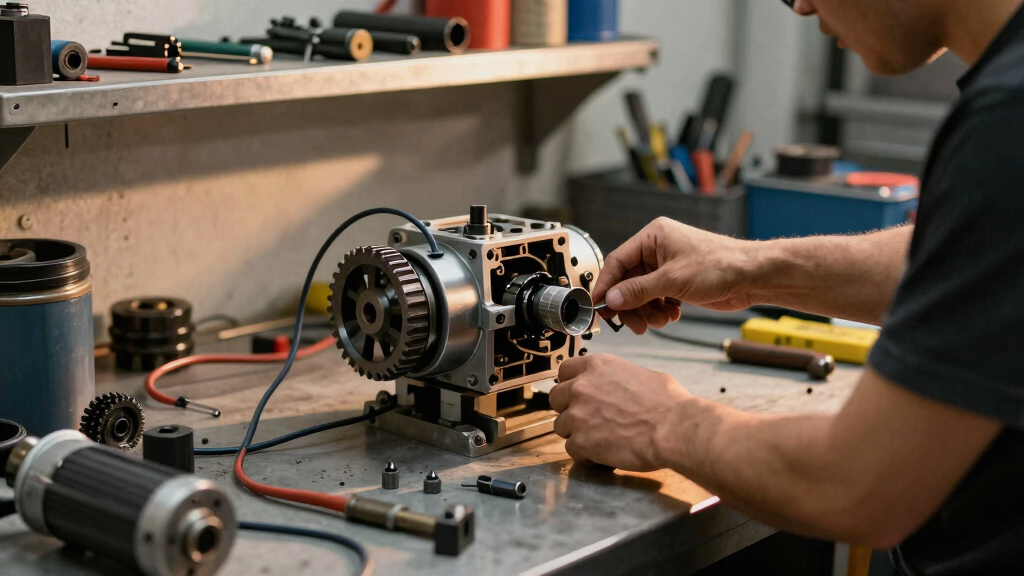
A hobbyist has successfully built and tested a DIY robot actuator designed to deliver 20 Nm of torque at 40 to 60 rpm, inspired by MIT research. The project aims to create affordable, high-performance actuators for humanoid robots, with initial testing revealing both achievements and challenges.
The builder, known for creating custom robotic components, designed the actuator with a cycloidal gearbox instead of the MIT’s planetary gearbox, aiming for better torque and reduced backlash. The motor features a hand-wound stator using an off-the-shelf core, housed in a 3D-printed and CNC-machined casing. Testing on a benchtop power supply showed the motor could produce approximately 7 Nm of torque, below the target, but the builder suggests that using a more capable power supply could improve performance.
During testing, excessive backlash was observed in the cycloidal gearbox, attributed to poor manufacturing tolerances, and the overall construction costs exceeded $400, making it more expensive than initially planned. Despite these issues, the builder plans to refine the design, addressing backlash and cost concerns in future revisions. CAD files of the design are publicly available for community review and iteration.
Implications for DIY Robotics and Actuator Development
This project demonstrates the potential for hobbyists to develop high-torque, custom actuators for humanoid robots, which could lower costs and increase accessibility in robotics development. Although still in early stages, the builder’s work highlights key challenges—such as backlash and power limitations—that must be addressed to make DIY actuators more practical for real-world applications. The open sharing of CAD files encourages community collaboration and innovation in this space.

MyActuator Servo Actuator System RMD-X10-P7-40-C-N Brushless DC Servo Motor Dual Encoder with MCX500 Driver High Torque for Robot Arm Pancake Actuator BLDC Servo Motor
- High-Performance RMD-X V3 Series: Supports two encoders and high torque
- Advanced Debugging Software: Remote firmware updates and real-time data
- Safe and Reliable Operation: Multiple protections and stable industrial connectors
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Background on Robotic Actuator Development and DIY Efforts
Designing effective actuators is a critical challenge in robotics, especially for humanoid robots that require high torque and precise control. Traditionally, industrial actuators are costly and complex, prompting hobbyists and researchers to explore DIY alternatives inspired by academic research. Previous projects have focused on various gearboxes and motor configurations, but achieving a balance of performance, cost, and simplicity remains difficult. This build follows a recent trend of applying open-source principles to robotic hardware development, with the aim of democratizing access to advanced robotics components.
“The use of a cycloidal gearbox in this design aims to improve torque capacity and reduce backlash compared to traditional planetary gearboxes.”
— an anonymous researcher
Unresolved Performance and Cost Challenges
It remains unclear whether the builder’s design can reliably meet the target torque and speed specifications in real-world applications. The impact of backlash and the actual cost of scaling the design are still uncertain, as the current prototype exceeded the initial budget and exhibited issues that could affect performance.
Upcoming Revisions and Community Engagement
The builder plans to refine the gearbox tolerances, explore higher-capacity power supplies, and optimize the design for cost and performance. Sharing CAD files publicly aims to invite community feedback and collaborative improvements, potentially leading to more robust and affordable DIY actuators in the future.
Key Questions
Can this DIY actuator be used in real humanoid robots?
Currently, the actuator is in early testing stages and faces challenges such as backlash and limited torque. Further development is needed before it can be reliably used in real robots.
What are the main technical challenges faced in this build?
Key issues include excessive backlash in the cycloidal gearbox, limited torque output due to power supply constraints, and higher-than-expected construction costs.
Will the builder share detailed plans or instructions?
Yes, CAD files of the design are publicly available for community review and modification, encouraging collaborative improvement.
How does this project compare to commercial actuators?
While commercial actuators generally offer higher reliability and performance, this DIY project aims to provide a low-cost, customizable alternative for hobbyists and researchers.
What are the next steps for this project?
The builder intends to improve gearbox tolerances, test with higher-capacity power supplies, and reduce costs in future iterations.
Source: Hackaday







